
RC 비행기의 3D 곡예비행에서 조종 실력이 가장 중요한 요소일 수는 있지만, 기체와 조종기의 설정을 더 정확하게 맞춰주면 곡예비행을 수행하는 데 큰 도움이 된다.
이 글에서는 세계 곡예 비행 챔피언이자 ‘3D 곡예비행의 아버지’로 불리는 Quique Somenzini의 조언을 바탕으로, 곡예비행에 적합한 기체와 조종기 설정에 대해 알아본다.
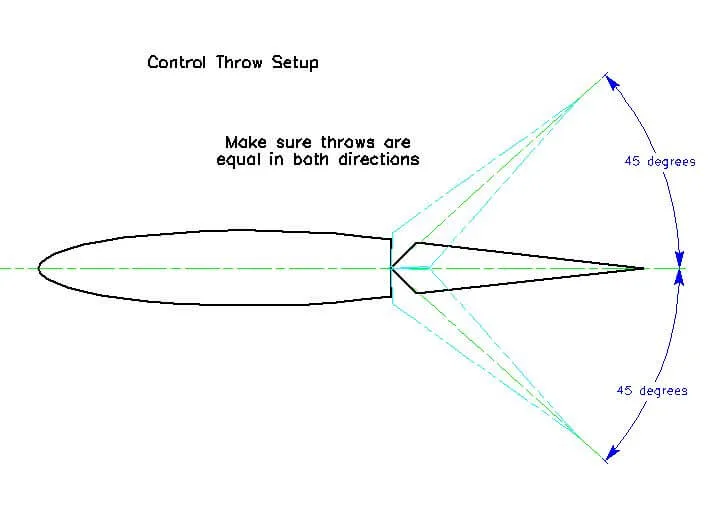
조종 타면과 타각의 설정 (Control Surface Area)
3D 곡예비행을 하려면 비행기의 타면이 충분히 넓어야 한다. 그렇다면 타면은 어느 정도로 넓어야 할까? 엘리베이터는 수평꼬리날개 면적의 40%, 러더는 수직꼬리날개 면적의 50%, 에일러론은 주익 면적의 20% 이상이면 된다.
면적만큼이나 타각도 중요하다. 엘리베이터는 45도 이상, 러더는 45도 이상, 에일러론은 35도 이상의 타각이 필요하다. 이렇게 넓은 타면과 큰 타각이 조합되면, 상대적으로 적은 양의 공기가 타면을 지나더라도 기체를 안정적으로 제어하기 쉬워진다.
또한 큰 타면과 타각을 안정적으로 움직이기 위해서는 튼튼한 링키지(linkage)와 충분한 토크를 가진 서보가 필요하다. 아날로그 서보보다 디지털 서보가 유지력(Holding Power) 등 성능 면에서 우수하므로, 디지털 서보를 사용하는 것이 좋다. 또한 충격 등에 의해 서보기어가 파손되는 것을 방지하려면, 메탈기어(MG, Metal Gear)를 사용한 서보를 선택하는 것이 바람직하다.
무게중심 (Center of Gravity)
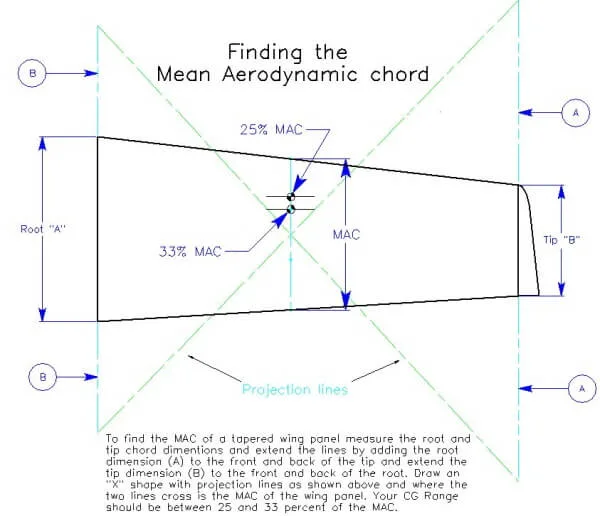
무게중심 또한 3D 곡예 비행을 수행하는 데 핵심적인 요소다. 무게중심을 뒤쪽으로 이동시키면 비행기의 안정성은 떨어지지만, 피치(pitch)나 요(yaw) 제어에 대한 반응은 더 민감해진다. 대부분의 3D 곡예 비행기에서 무게중심은 평균공력시위(Mean Aerodynamic Chord, MAC)의 32~33% 지점에 위치한다.
물론 기체마다 차이가 있지만, 곡예 성능과 안정성 사이에서 최적의 균형을 잡으려면 MAC의 37~40% 지점이 가장 적절한 위치가 된다.
곡예비행의 기동에서 무게중심은 매우 중요한 요소다. 단순히 큰 타면만으로는 부족하다. 3D 곡예 비행을 위한 최적의 무게중심은 ‘최선’이라기보다는 ‘차선’의 선택이다. 직접 테스트를 통해 기체에 가장 잘 맞고, 다양한 기동에 대응할 수 있는 이상적인 무게중심을 찾아야 한다.
앞서 언급했듯이 무게중심을 뒤로 이동시키면 3D 기동은 더 민첩해지지만, 비행의 정확도는 떨어진다. 반대로 무게중심이 앞쪽에 있으면 정확도는 올라가지만, 과감한 3D 곡예 비행이 어렵다. 이런 특성을 잘 이해하고, 자신이 원하는 곡예비행 스타일에 따라 무게중심을 설정해야 한다.
대부분의 곡예비행 조종사들은 꼬리 쪽에 무게추를 추가해서 무게중심을 뒤로 옮기기도 한다. 단, 무게중심이 지나치게 뒤로 가면 조종이 매우 어려워지고 실속(stall) 위험이 커지며 착륙도 힘들어진다.

정밀한 곡예비행 기동을 원한다면 MAC의 35% 지점에 무게중심(CG)을 두는 것이 좋다. 반면, 프리스타일 비행을 위해서는 38%까지 이동시키는 경우가 많다. 위 그림처럼 MAC를 먼저 구한 후, 그 기준으로 무게중심을 잡고 비행 전 참고하지만, 실제로는 비행을 여러 번 해본 뒤에 최종적인 CG를 결정하는 방식이 가장 효과적이다. 이게 가장 현실적이고 정확한 방법이다.
테스트 비행으로 무게 중심을 찾는 방법 (Flight Testing the CG)
- 정밀 기동을 위한 무게 중심을 찾는 방법
- 비행기를 상공으로 올린 뒤 수평 비행을 유지한다. 그리고 스로틀을 100%로 유지한 상태에서 기체를 45도 각도로 당겨 올린다. 이 상태에서 배면비행에 진입하면 된다. 기체가 45도 라인을 따라 약 2~3초간 배면 상태를 유지하다가, 캐노피 방향(즉, 지면 방향)으로 자연스럽게 하강하기 시작하면 무게 중심이 적절하게 설정된 것이다. 이때 직선 비행을 유지하려면 엘리베이터 스틱을 살짝 밀어줘야 하는 상태여야 한다.
- 3D기동을 위한 무게중심을 찾는 방법
- 기체를 띄운 후 수평 비행 상태에서 스로틀을 약 50%로 유지한다. 그런 다음 배면비행에 진입하고, 약 3~3.5초 정도 수평을 유지한다. 이후 기체가 캐노피 방향(지면 방향)으로 자연스럽게 하강하기 시작하면 무게중심이 잘 맞는 것이다. 이때 배면 비행을 유지하려면 엘리베이터 스틱을 앞으로 밀어줘야 한다.
- 만약 배면 비행 중에 기체가 스스로 상승하려고 한다면, 꼬리가 무거운 상태라는 뜻이고, 이 경우에는 무게 중심을 다시 조정해야 한다.
다양한 곡예비행을 위한 최적의 무게 중심(CG) 위치를 정확히 파악하게 되면, 기체는 최고의 비행 성능을 발휘하게 된다.
조종기 설정 (Radio Setup)
3D 곡예비행을 제대로 수행하려면 조종기 설정이 매우 중요하다. 조종기는 자유로운 3D 비행과 정밀 곡예를 가능하게 하는 필수적인 요소다. 최고급 조종기가 꼭 필요한 것은 아니지만, Dual Rate와 Exponential 기능이 있다면 훨씬 더 쉽게 비행을 제어할 수 있다.
3D 기체는 큰 타면과 타각, 그리고 뒤로 치우친 무게중심 때문에 기체 반응이 매우 민감하다. 또, 3D 비행은 낮은 속도와 큰 피치(pitch), 요(yaw), 회전이 수반되는 완전히 다른 방식의 비행이기 때문에, 부드럽고 정밀하며 우아한 곡예 비행을 하려면 Dual Rate와 Exponential 설정이 꼭 필요하다. 이 설정은 대부분 조종사의 감각과 스타일에 따라 다르다. 여기서는 나의 설정 방식을 기준으로 설명한다.
먼저 High Rate를 설정한다. 3D 기체는 모든 타면에서 최대 타각이 요구되기 때문에, 엘리베이터, 러더, 에일러론 모두 140%로 설정한다. 그리고 링키지(linkage)와 서보혼(servo horn)이 부하 없이 부드럽게 동작하는지 반드시 확인해야 한다. 또한, 에일러론과 엘리베이터의 타각이 상하로 대칭되도록 조정해야 한다. 이 모든 점검이 끝나면 Low Rate 설정으로 넘어간다.
먼저 고려할 점은, “언제 Low Rate를 사용해야 할까?”라는 것이다.
“일반적인 비행에서는 Low Rate를 사용하고, 스냅롤이나 스핀 같은 3D 곡예비행 기동을 할 때에는 High Rate로 전환해서 사용한다”
Low Rate 설정은 조금 복잡한 편이다. 그 이유는 High Rate에 적용된 Exponential 값이 그대로 영향을 주기 때문이다. Low Rate의 설정값도 조종사마다 전부 다르다. 나의 경우, 초기 설정값으로는 엘리베이터는 25~30%, 러더는 80~90%, 에일러론은 60~70%로 맞춘다. 이 수치들이 초반 설정값으로는 꽤 적절하다고 생각한다. 이후에는 필드에서 실제 비행을 하면서 세부적인 값을 조절해 나간다.
